Robotprogram med 3d-printade delar
Montering av snabbkoppling
– Konceptuellt designförslag för vidareutveckling.
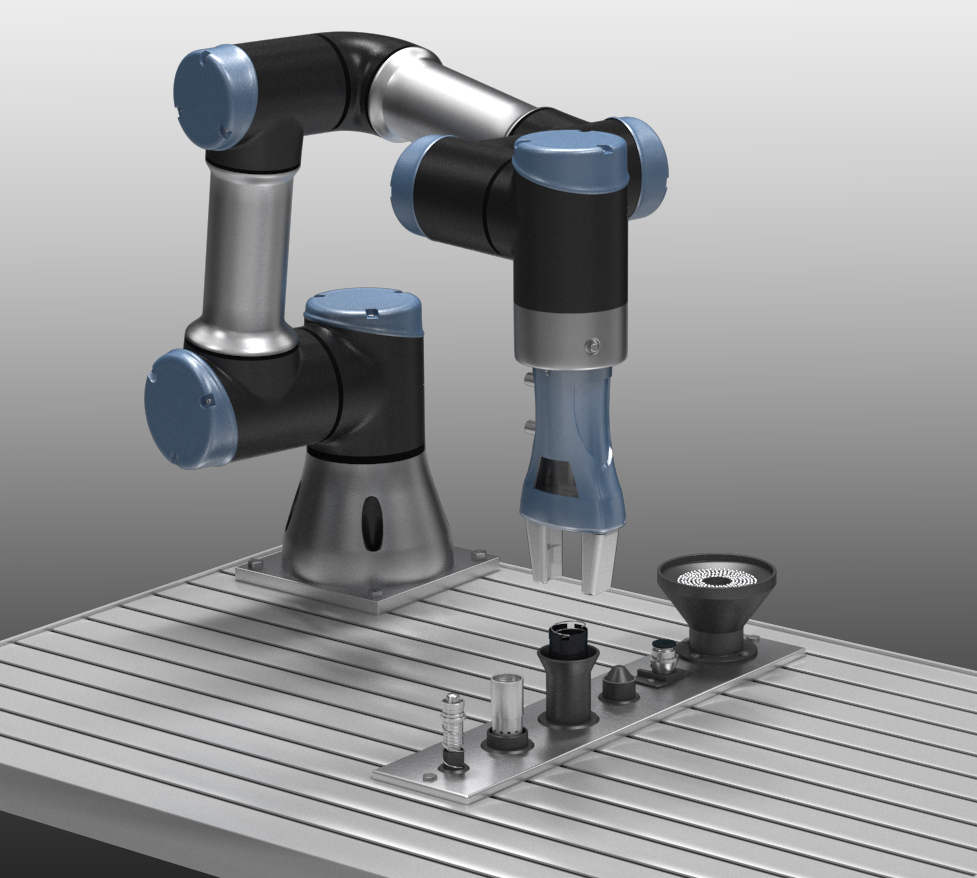
– Gripare och monteringsstation är egendesignat och 3d-printad för konceptet.
– Griparen drivs av pneumatik.
– Programmet är testat och verifierat i verkligheten (se film).
Testprogram
Filmen visar när vi kör testprogrammet för monteringen. Notera att kulor och ring inte är med när programmet körs. Anledningen är att undvika att kopplingen monteras helt. Om dessa delar skulle vara med så monteras snabbkopplingen helt, och då kan man inte demontera den igen utan att göra sönder den. Istället fick vi testa dessa moment separat.

Kollaborativ robot / Cobot
En kollaborativ robot, så kallad Cobot, är en robot anpassad att jobba nära människa utan att orsaka skador. De saknar ofta vassa kanter och har en kollisionskänslighet programmerad i sig för att undvika allvarliga olyckor. I det här projektet använde vi robotar av märket Universal Robots (UR).
Designhistoria
Projektet gjordes på Chalmers tekniska högskola på öppet uppdrag av CEJN. Ett företag specialiserat på snabbkopplingar. Bakgrunden till uppdraget var att deras dåvarande montering av snabbkoppling gjordes för hand av fabriksarbetare. Man ville modernisera den här processen och se hur man med hjälp av kollaborativa robotar kan underlätta monteringen. Projektet gjordes i ett team på 4 studenter.
Uppgiften bestod av att designa ett förslag på montering med hjälp av en Cobot. Monteringen kunde vara antingen delar av snabbkopplingen eller hela. Snabbkopplingens bestod av 7 delar och kulor som behöver monteras ihop i en särskild ordning.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Efter mycket skissande, mätande och diskussioner började vi ta fram en 3d-modell på en gripare som hade möjlighet att greppa flera olika former beroende på höjd vid själva ”greppet”. Denna gripare 3d-printade vi ut och monterade i en pneumatisk drivenhet. Även ett skyddande skal togs fram med ett titthål för att se hur allt fungera.
Kulorna och ringen behövde dock monteras underifrån. Därför gjordes speciella stationer i monteringsplattan och en lös magnetisk del som griparen kunde trycka och vrida emot för att få delarna på plats.
Slutligen programmades vi ett program för Coboten att utföra monteringen och som kan ses i filmen ovan.
Feedbacken av CEJN blev mycket positiv över att monteringen kunde lösas helt med ganska enkla knep, men lite självkritik är att även om denna lösning monterar hela snabbkopplingen så saknas det verifikation att allt har gått rätt till. Naturligt i en vidareutveckling är att systemet kompletteras med sensorer som kontrollerar detta.